



- [11-12]·应用场景示例:教学
- [11-12]·平台组成
- [11-12]·硬件总体部署
- [11-12]·虚拟仿真实验室
- [11-12]·大气数据系统的原理操作
- [11-12]·三维立体虚拟仿真环境
一、实验目的
通过实验的内容,在理解飞行程序和飞行仪表工作原理的基础上,使学生了解仪表离场程序的形式,以及对航迹设置的要求。
基本要求:
1. 了解离场程序的定义及离场的形式.
2. 了解仪表离场程序的三种形式.
3. 了解直线离场对航迹设置的要求,及最小超障余度和最小净爬升梯度的概念.
4. 了解转弯离场对航迹设置的要求及指定高度转弯和指定点转弯的概念.
(1).直线离场:直线离场对航迹设置的要求、最小超障余度和最小净爬升梯度的相关概念.
(2).转弯离场对航迹设置的要求、指定高度转弯离场及指定点转弯离场的相关概念.
二、实验教学方法与步骤要求
1 实验航图识别,根据离场航图中的参数,通过显示控制单元设定离场参数。
2 利用主飞行显示器,导航显示器观察设定的离场参数
3 利用无线电导航设备,查看离场设定中的导航设备设施。
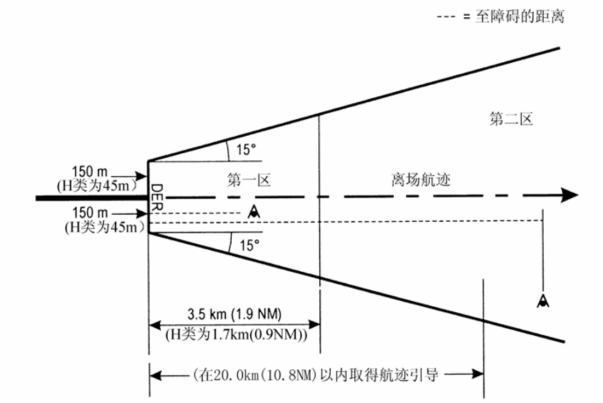
1 直线离场(无航迹引导)
航迹改变小于 15°,在 20km(10.8NM)内必须取得航迹引导。
超障余度: 0.8%。
保护区起始于 DER,起始宽度为 300m(H 类, 90 m)。保护区以跑道中线为中心,在
跑道中线延长线两侧,分别按 15°的角度向外扩展。
(1)直线离场(离场航迹与跑道方向一致)
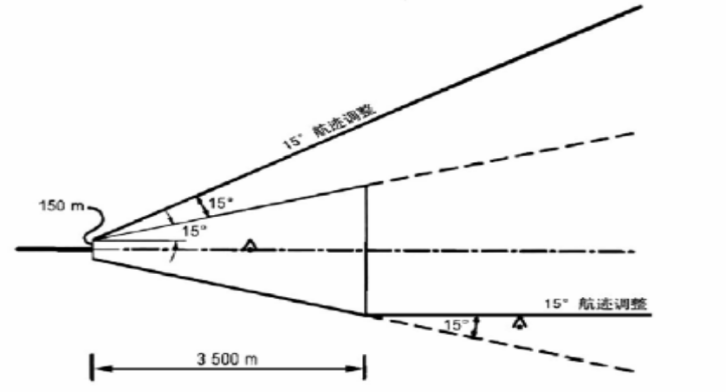
(2)直线离场(离场航迹与跑道方向夹角小于 15°)
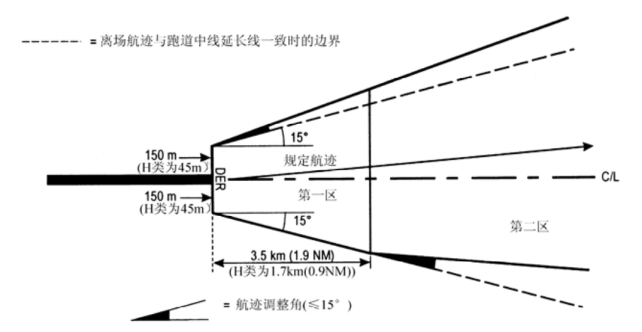
a) 15°的航迹调整可行的条件
障碍物偏离跑道中心线超过第 1 区 1/2 宽度。
第 1 区半宽=150+3 500×tan15°=1087.8m。
由于如果障碍物偏离跑道中心线小于 1087.8m,就可以调整航迹。
最小航迹调整角确定
最小航迹调整角=15°-tan-1(障碍物偏离跑道中心线距离-1088)
(障碍物距 DER 的距离-3500)
例:障碍物 O1 距跑道中心线距离 1325m,距 DER 距离 5500m。
最小航迹调整角=15°-tan-1(1325-1088)/(5500-3500)=15-6.75=8.24°
b) 15°的航迹调整可行的条件
障碍物 O1 :高 52m,在跑道中线上,离跑道起飞末端(DER) 2km,
障碍物 O2 :高 250m,位于跑道中线右侧 1325m,离 DER 5500m。
第 1 步:确定障碍物是否在离场保护区内
画出直线离场保护区,确定 O1、 O2 都在保护区内。
用直尺量出 O1 离跑道起飞末端(DER) 2km, O2 离跑道起飞末端(DER) 5500m,
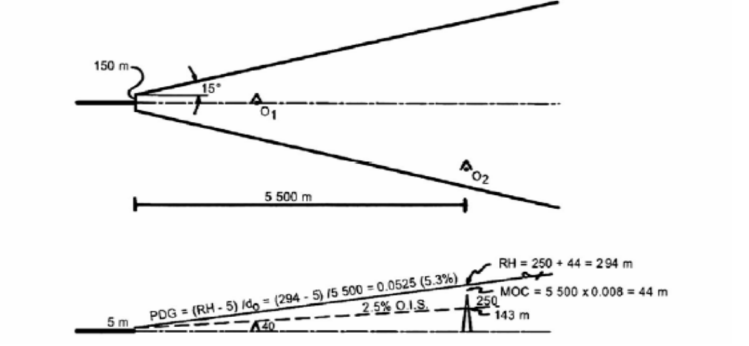
第 2 步:确定飞越 O1、 O2 所需的爬升梯度
O1 的要求高=52+(2000×0.008) =68m
O2 的要求高=250+(5500×0.008) =294m
O1 的梯度=(68-5) /2000=0.0315(3.15%)。
O2 的梯度=(294-5) /5500=0.0525(5.3%)。 PDG=5.3%。
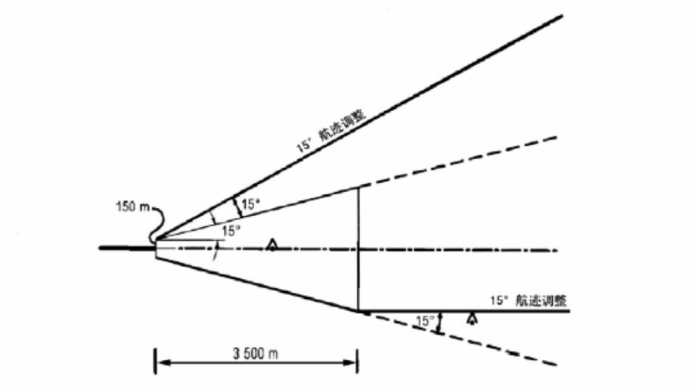
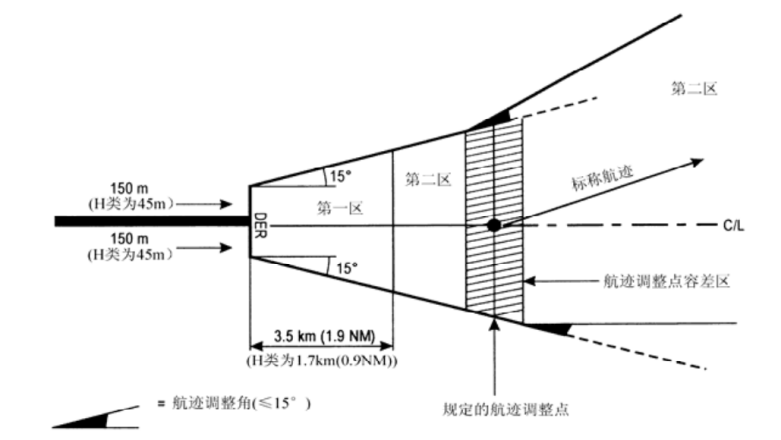
c) 直线离场区,有规定的航迹调整点
i) 从航迹调整点的定位容差最早点开始,在航迹调整一侧的保护区边界扩展应增加一个航迹调整角度;
ii) 从航迹调整点的定位容差最晚点开始,在航迹调整另一侧的保护区边界扩展应减小一个航迹调整角度。
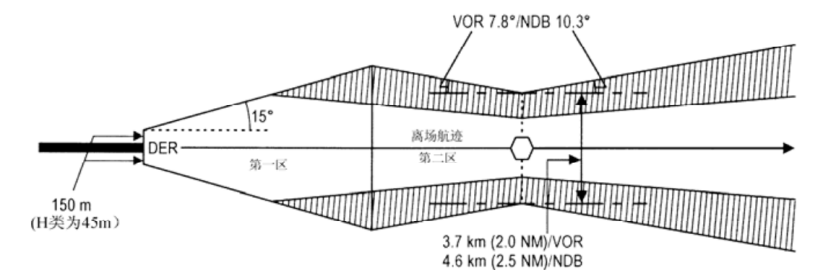
(3) 直线离场(前方有电台)
(4) 直线离场(有航迹引导)

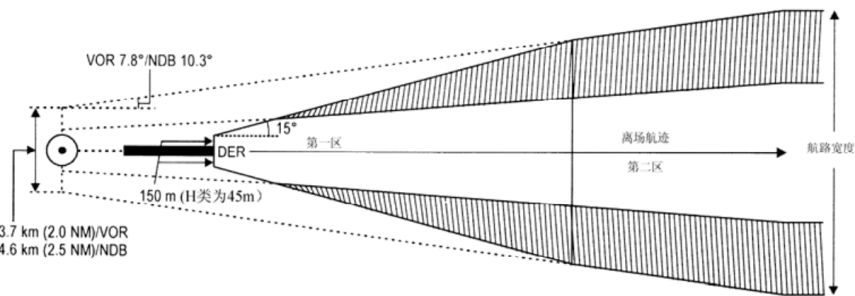
(5) 直线离场(后方有电台)
三、实验结果与结论要求
1 实验航图识别,根据离场航图中的参数,通过显示控制单元设定离场参数。
2 利用主飞行显示器,导航显示器观察设定的离场参数
3 利用无线电导航设备,查看离场设定中的导航设备设施。
- 上一篇:没有了
- 下一篇:赛斯纳172虚拟仿真实验